To help train the next generation of engineers, XIMEA recently supplied the top university teams at Estonia’s annual robotic competition, ROBOTEX, with XIMEA industrial cameras for machine vision robotic guidance.
Using XIMEA's Best CURRERA Application teams acquired CURRERA-R smart PC cameras and xiQ USB3 Vision cameras for the three-day robotic competition.
ROBOTEX tests each team’s ability to design a robot that can accomplish several tasks, from following a line to autonomous soccer.
Apparently having good cameras provides you with a competitive edge not only in industrial machine vision, but also in robot, because all three finalists used XIMEA cameras to achieve their goal.
The ROBOTEX autonomous Robot Soccer rules are a hybrid between the small- and middle-size league rules of the largest robotic soccer competition, ROBOCUP.
Robotex competition is always the high-point of the three day event.
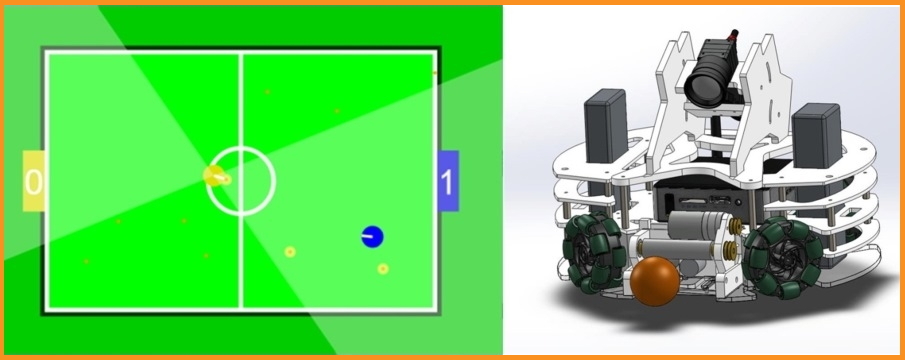
The pro-league robots use computer vision to find the footballs (orange golf balls) on a field that 4.6m x 3.1m field with a pair of 0.7m-wide goals.
There are a total of 11 balls on the field, and the winning robot has to get all 11 balls into the opposing team’s goal.
The one to do it fastest in two rounds wins and moves to the next round of the tournament.
Each game consists of a maximum 3 rounds with each round lasting 90 seconds.